Modulasi ialah proses elektrik bukan linear di mana parameter satu isyarat (pembawa) diubah menggunakan isyarat lain (modulasi, maklumat). Dalam teknologi komunikasi, frekuensi, amplitud, dan modulasi fasa digunakan secara meluas. Dalam elektronik kuasa dan teknologi mikropemproses, modulasi lebar denyut telah meluas.
Kandungan
Apakah itu PWM (Pulse Width Modulation)
Dengan modulasi lebar denyut bagi isyarat asal, amplitud, kekerapan dan fasa isyarat asal kekal tidak berubah. Tempoh (lebar) nadi segi empat tepat tertakluk kepada perubahan di bawah tindakan isyarat maklumat. Dalam kesusasteraan teknikal Inggeris, ia disingkatkan sebagai PWM - modulasi lebar nadi.
Bagaimana PWM berfungsi
Isyarat termodulat lebar nadi dibentuk dalam dua cara:
- analog;
- digital.
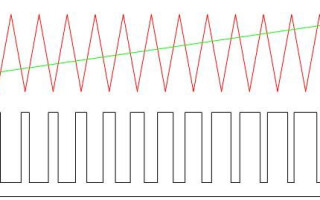
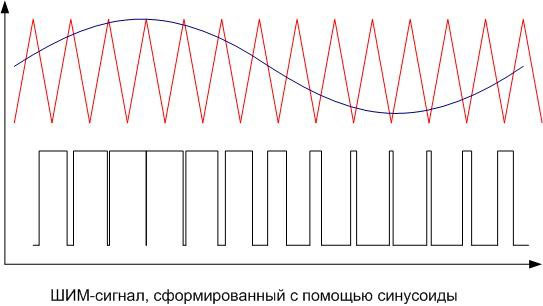
Dengan kaedah analog untuk mencipta isyarat PWM, pembawa dalam bentuk isyarat gigi gergaji atau segi tiga disalurkan kepada penyongsang. input pembanding, dan maklumat - tentang bukan penyongsangan. Jika tahap pembawa serta-merta lebih tinggi daripada isyarat modulasi, maka keluaran pembanding adalah sifar, jika lebih rendah - satu. Output ialah isyarat diskret dengan frekuensi yang sepadan dengan frekuensi segitiga pembawa atau gergaji, dan panjang nadi berkadar dengan tahap voltan modulasi.
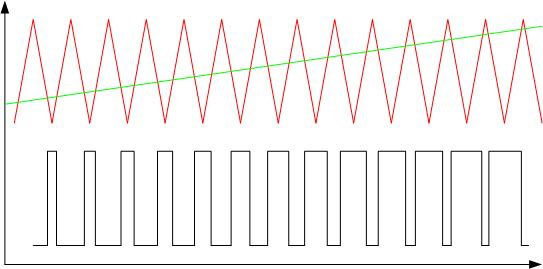
Sebagai contoh, modulasi lebar nadi bagi isyarat segi tiga meningkat secara linear. Tempoh denyutan keluaran adalah berkadar dengan tahap isyarat keluaran.
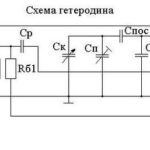
Pengawal PWM analog juga tersedia dalam bentuk litar mikro siap pakai, di dalamnya pembanding dan litar penjanaan pembawa dipasang. Terdapat input untuk menyambungkan elemen tetapan frekuensi luaran dan membekalkan isyarat maklumat. Isyarat dikeluarkan daripada output yang mengawal kekunci asing yang berkuasa. Terdapat juga input untuk maklum balas - ia diperlukan untuk mengekalkan parameter kawalan yang ditetapkan. Ini, sebagai contoh, adalah cip TL494. Untuk kes di mana kuasa pengguna agak kecil, pengawal PWM dengan kunci terbina dalam tersedia. Kunci dalaman litar mikro LM2596 direka untuk arus sehingga 3 ampere.
Kaedah digital dijalankan menggunakan litar mikro atau mikropemproses khusus. Panjang nadi dikawal oleh program dalaman. Banyak mikropengawal, termasuk PIC dan AVR yang popular, mempunyai modul terbina dalam untuk pelaksanaan perkakasan PWM "di papan", untuk menerima isyarat PWM, anda perlu mengaktifkan modul dan menetapkan parameter operasinya.Sekiranya modul sedemikian tidak tersedia, maka PWM boleh dianjurkan semata-mata oleh perisian, ini tidak sukar. Kaedah ini memberikan lebih kuasa dan kebebasan melalui penggunaan output yang fleksibel, tetapi menggunakan lebih banyak sumber pengawal.
Ciri-ciri isyarat PWM
Ciri-ciri penting isyarat PWM ialah:
- amplitud (U);
- kekerapan (f);
- kitaran tugas (S) atau kitaran tugas D.
Amplitud dalam volt ditetapkan bergantung pada beban. Ia mesti menyediakan voltan bekalan terkadar pengguna.
Kekerapan isyarat yang dimodulasi oleh lebar nadi dipilih daripada pertimbangan berikut:
- Semakin tinggi frekuensi, semakin tinggi ketepatan kawalan.
- Kekerapan tidak boleh lebih rendah daripada masa tindak balas peranti yang dikawal oleh PWM, jika tidak, riak ketara parameter terkawal akan berlaku.
- Semakin tinggi frekuensi, semakin tinggi kerugian pensuisan. Ia timbul daripada fakta bahawa masa penukaran kunci adalah terhad. Dalam keadaan terkunci, semua voltan bekalan jatuh pada elemen utama, tetapi hampir tiada arus. Dalam keadaan terbuka, arus beban penuh mengalir melalui kekunci, tetapi penurunan voltan adalah kecil, kerana rintangan pemprosesan adalah beberapa ohm. Dalam kedua-dua kes, pelesapan kuasa adalah diabaikan. Peralihan dari satu keadaan ke keadaan lain berlaku dengan cepat, tetapi tidak serta-merta. Dalam proses membuka kunci-mengunci, voltan besar jatuh pada elemen separa terbuka dan pada masa yang sama arus yang ketara mengalir melaluinya. Pada masa ini, kuasa yang hilang mencapai nilai yang tinggi. Tempoh ini pendek, kunci tidak mempunyai masa untuk memanaskan badan dengan ketara.Tetapi dengan peningkatan dalam kekerapan selang masa sedemikian setiap unit masa, ia menjadi lebih banyak, dan kehilangan haba meningkat. Oleh itu, untuk membina kunci, adalah penting untuk menggunakan elemen pantas.
- Apabila memandu motor elektrik kekerapan perlu diambil dari kawasan yang boleh didengari oleh seseorang - 25 kHz dan ke atas. Kerana pada frekuensi PWM yang lebih rendah, wisel yang tidak menyenangkan berlaku.
Keperluan ini sering bercanggah antara satu sama lain, jadi pilihan kekerapan dalam beberapa kes adalah kompromi.
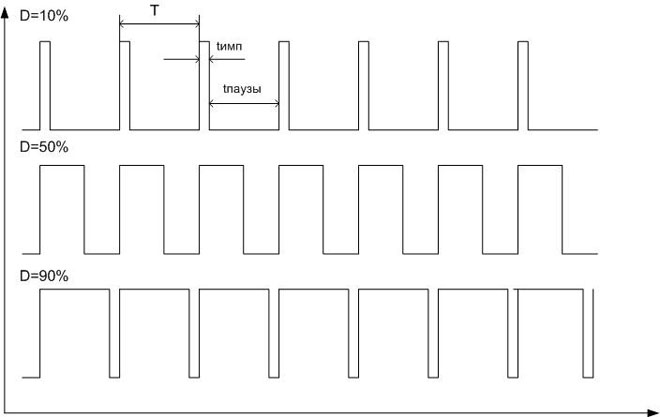
Nilai modulasi mencirikan kitaran tugas. Oleh kerana kadar ulangan nadi adalah malar, tempoh tempoh itu juga tetap (T=1/f). Tempoh itu terdiri daripada impuls dan jeda, yang mempunyai tempoh, masing-masing, timp dan tberhenti seketika, dan timp+tberhenti seketika=T. Kitaran tugas ialah nisbah tempoh nadi kepada tempoh - S \u003d timp/T. Tetapi dalam praktiknya ternyata lebih mudah untuk menggunakan nilai timbal balik - faktor isian: D=1/S=T/timp. Ia adalah lebih mudah untuk menyatakan faktor isian sebagai peratusan.
Apakah perbezaan antara PWM dan SIR
Dalam kesusasteraan teknikal asing tidak ada perbezaan antara modulasi lebar nadi dan peraturan lebar nadi (PWR). Pakar Rusia cuba membezakan antara konsep ini. Malah, PWM adalah sejenis modulasi, iaitu, perubahan dalam isyarat pembawa di bawah pengaruh yang lain, memodulasi satu. Isyarat pembawa bertindak sebagai pembawa maklumat, dan isyarat modulasi menetapkan maklumat ini. Dan peraturan lebar nadi ialah peraturan mod beban menggunakan PWM.
Sebab dan aplikasi PWM
Prinsip modulasi lebar nadi digunakan dalam pengawal kelajuan motor tak segerak yang berkuasa. Dalam kes ini, isyarat modulasi frekuensi boleh laras (fasa tunggal atau tiga fasa) dijana oleh penjana gelombang sinus berkuasa rendah dan ditindih pada pembawa dengan cara analog. Output adalah isyarat PWM, yang disalurkan kepada kekunci kuasa yang diperlukan. Kemudian anda boleh melepasi urutan denyutan yang terhasil melalui penapis laluan rendah, contohnya, melalui litar RC mudah, dan pilih sinusoid asal. Atau anda boleh melakukannya tanpa itu - penapisan akan berlaku secara semula jadi disebabkan oleh inersia enjin. Jelas sekali, lebih tinggi frekuensi pembawa, lebih banyak bentuk gelombang keluaran hampir dengan sinusoid asal.
Persoalan semula jadi timbul - mengapa mustahil untuk menguatkan isyarat penjana dengan segera, sebagai contoh, menggunakan transistor berkuasa? Kerana elemen pengawal selia yang beroperasi dalam mod linear akan mengagihkan semula kuasa antara beban dan kunci. Dalam kes ini, kuasa yang ketara dibazirkan pada elemen utama. Jika elemen kawalan berkuasa beroperasi dalam mod kekunci (trinistor, triac, transistor RGBT), maka kuasa diagihkan dari semasa ke semasa. Kerugian akan jauh lebih rendah, dan kecekapan akan lebih tinggi.
Dalam teknologi digital, tiada alternatif khusus kepada peraturan lebar nadi. Amplitud isyarat adalah malar di sana, voltan dan arus boleh diubah hanya dengan memodulasi pembawa sepanjang lebar nadi dan seterusnya meratakannya. Oleh itu, PWM digunakan untuk mengawal voltan dan arus pada objek yang boleh purata isyarat nadi. Purata berlaku dalam cara yang berbeza:
- disebabkan oleh inersia beban.Oleh itu, inersia haba pemanas termoelektrik dan lampu pijar membolehkan objek terkawal tidak menyejukkan dengan ketara dalam jeda antara denyutan.
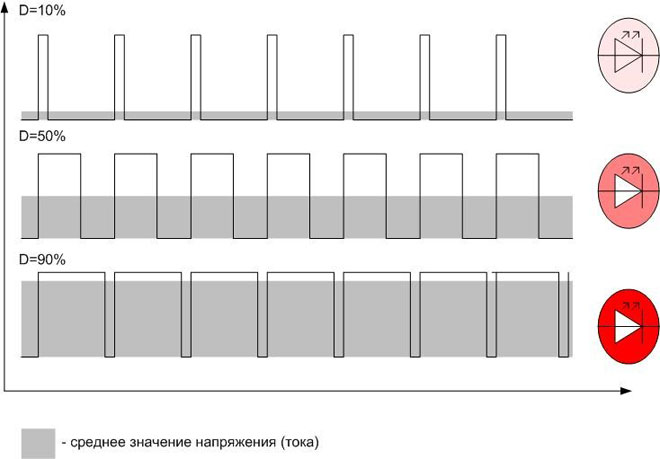
- Disebabkan oleh inersia persepsi. LED mempunyai masa untuk keluar dari nadi ke nadi, tetapi mata manusia tidak menyedarinya dan menganggapnya sebagai cahaya yang berterusan dengan keamatan yang berbeza-beza. Prinsip ini digunakan untuk mengawal kecerahan titik monitor LED. Tetapi kelipan yang tidak dapat dilihat dengan kekerapan beberapa ratus hertz masih ada dan menyebabkan keletihan mata.
- disebabkan oleh inersia mekanikal. Sifat ini digunakan dalam kawalan motor DC berus. Dengan kekerapan peraturan yang dipilih dengan betul, motor tidak mempunyai masa untuk perlahan dalam jeda mati.
Oleh itu, PWM digunakan di mana nilai purata voltan atau arus memainkan peranan yang menentukan. Sebagai tambahan kepada kes biasa yang disebutkan, kaedah PWM mengawal arus purata dalam mesin kimpalan dan pengecas bateri, dsb.
Jika purata semula jadi tidak dapat dilakukan, dalam banyak kes peranan ini boleh diambil alih oleh penapis laluan rendah yang telah disebutkan (LPF) dalam bentuk rantai RC. Untuk tujuan praktikal, ini sudah cukup, tetapi mesti difahami bahawa adalah mustahil untuk mengasingkan isyarat asal dari PWM menggunakan penapis lulus rendah tanpa herotan. Lagipun, spektrum PWM mengandungi bilangan harmonik yang tidak terhingga yang pasti akan jatuh ke dalam jalur laluan penapis. Oleh itu, seseorang tidak seharusnya membina ilusi tentang bentuk sinusoid yang dibina semula.
Kawalan LED RGB PWM yang sangat cekap dan berkesan. Peranti ini mempunyai tiga persimpangan p-n - merah, biru, hijau.Dengan menukar secara berasingan kecerahan cahaya setiap saluran, anda boleh mendapatkan hampir semua warna cahaya LED (kecuali putih tulen). Kemungkinan untuk mencipta kesan pencahayaan dengan PWM adalah tidak berkesudahan.
Aplikasi yang paling biasa bagi isyarat digital termodulat lebar nadi adalah untuk mengawal purata arus atau voltan yang mengalir melalui beban. Tetapi penggunaan bukan standard jenis modulasi ini juga mungkin. Semuanya bergantung pada imaginasi pemaju.
Artikel yang serupa: