Penderia dalam pengertian umum ialah peranti yang menukar satu kuantiti fizikal kepada kuantiti fizikal yang lain, mudah untuk pemprosesan, penghantaran atau penukaran seterusnya. Sebagai peraturan, kuantiti pertama adalah fizikal, tidak bersetuju dengan pengukuran langsung (suhu, kelajuan, anjakan, dll.), Dan yang kedua ialah isyarat elektrik atau optik. Niche dalam bidang alat pengukur diduduki oleh sensor, elemen utamanya ialah induktor.
Kandungan
Bagaimana penderia kearuhan berfungsi dan cara ia berfungsi
Menurut prinsip operasi, sensor induktif aktif, iaitu, mereka memerlukan penjana luaran untuk berfungsi. Ia memberikan isyarat dengan frekuensi dan amplitud yang diberikan kepada induktor.
Arus yang melalui lilitan gegelung menghasilkan medan magnet. Jika objek konduktif memasuki medan magnet, parameter gegelung berubah.Ia kekal hanya untuk membetulkan perubahan ini.
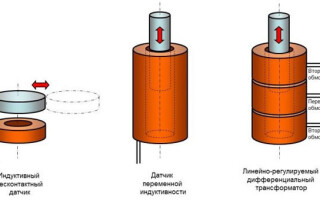
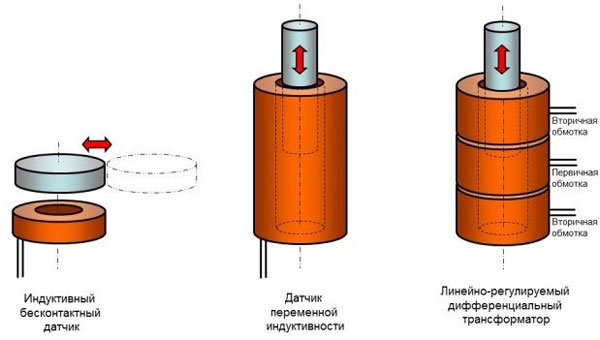
Penderia bukan sentuhan mudah bertindak balas terhadap rupa objek logam di zon berhampiran penggulungan. Ini mengubah impedans gegelung, perubahan ini mesti ditukar menjadi isyarat elektrik, menguatkan dan (atau) menetapkan laluan ambang menggunakan litar perbandingan.
Penderia jenis lain bertindak balas terhadap perubahan dalam kedudukan membujur objek yang berfungsi sebagai teras gegelung. Apabila kedudukan objek berubah, ia bergerak masuk atau keluar dari gegelung, dengan itu menukar kearuhannya. Perubahan ini boleh ditukar kepada isyarat elektrik dan diukur. Satu lagi versi sensor sedemikian ialah apabila objek mendekati gegelung dari luar. Ini menyebabkan kearuhan berkurangan disebabkan oleh kesan tanah.
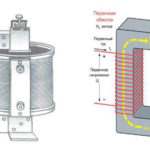
Satu lagi versi sensor anjakan induktif ialah pengubah pembezaan boleh laras secara linear (LVDT). Ia adalah gegelung komposit, dibuat mengikut susunan berikut:
- penggulungan sekunder 1;
- penggulungan utama;
- belitan sekunder 2.
Isyarat daripada penjana disalurkan ke belitan utama. Medan magnet yang dicipta oleh gegelung tengah mendorong EMF dalam setiap sekunder (prinsip transformer). Teras, apabila ia bergerak, mengubah sambungan bersama antara gegelung, mengubah daya gerak elektrik dalam setiap belitan. Perubahan ini boleh diperbaiki oleh litar pengukuran. Oleh kerana panjang teras adalah kurang daripada jumlah panjang gegelung komposit, kedudukan objek boleh ditentukan dengan jelas oleh nisbah EMF dalam belitan sekunder.
Pada prinsip yang sama - perubahan dalam gandingan induktif antara belitan - sensor giliran dibina.Ia terdiri daripada dua gegelung sepaksi. Isyarat digunakan pada salah satu belitan, EMF pada yang kedua bergantung pada sudut putaran bersama.
Dari prinsip operasi, jelas bahawa sensor induktif, tanpa mengira reka bentuk, adalah bukan hubungan. Mereka bekerja pada jarak jauh, dan tidak memerlukan sentuhan langsung dengan objek terkawal.
Kebaikan dan keburukan sensor induktif
Kelebihan sensor jenis induktif terutamanya termasuk:
- kebolehpercayaan reka bentuk;
- kekurangan sambungan kenalan;
- kuasa keluaran tinggi, yang mengurangkan pengaruh hingar dan memudahkan litar kawalan;
- sensitiviti tinggi;
- keupayaan untuk bekerja daripada sumber voltan ulang-alik frekuensi industri.
Kelemahan utama penderia jenis induktif ialah saiz, berat dan kerumitan pembuatannya. Untuk gegelung penggulungan dengan parameter yang diberikan, peralatan khas diperlukan. Juga, keperluan untuk mengekalkan amplitud isyarat dengan tepat dari pengayun induk dianggap sebagai tolak. Apabila ia berubah, kawasan sensitiviti juga berubah. Memandangkan penderia hanya beroperasi pada arus ulang alik, mengekalkan amplitud menjadi masalah teknikal tertentu. Secara langsung (atau melalui pengubah langkah turun) tidak mungkin untuk menyambungkan sensor ke rangkaian isi rumah atau industri - di dalamnya, turun naik voltan dalam amplitud atau frekuensi bahkan boleh mencapai 10% dalam mod biasa, yang menjadikan ketepatan pengukuran tidak dapat diterima .
Juga, ketepatan pengukuran boleh dipengaruhi oleh:
- medan magnet pihak ketiga (pelindung sensor adalah mustahil berdasarkan prinsip operasinya);
- pikap EMF pihak ketiga dalam bekalan dan kabel pengukur;
- kesilapan pembuatan;
- ralat ciri sensor;
- sebatan belakang atau ubah bentuk di tapak pemasangan sensor yang tidak menjejaskan prestasi keseluruhan;
- pergantungan ketepatan pada suhu (parameter wayar penggulungan berubah, termasuk rintangannya).
Ketidakupayaan sensor induktansi untuk bertindak balas terhadap rupa objek dielektrik dalam medan magnetnya boleh dikaitkan dengan kedua-dua kelebihan dan kekurangan. Di satu pihak, ini mengehadkan skop aplikasi mereka. Sebaliknya, ia menjadikannya tidak sensitif terhadap kehadiran kotoran, gris, pasir, dan lain-lain pada objek yang dipantau.
Pengetahuan tentang kekurangan dan kemungkinan batasan dalam operasi sensor induktif membolehkan penggunaan rasional kelebihan mereka.
Skop penderia induktif
Penderia kehampiran induktif sering digunakan sebagai suis had. Peranti sedemikian telah meluas:
- dalam sistem keselamatan, sebagai penderia untuk membuka tingkap dan pintu tanpa kebenaran;
- dalam sistem telemekanik, sebagai penderia kedudukan akhir unit dan mekanisme;
- dalam kehidupan seharian dalam skema untuk menunjukkan kedudukan tertutup pintu, bidai;
- untuk mengira objek (contohnya, bergerak di sepanjang tali pinggang penghantar);
- untuk menentukan kelajuan putaran gear (setiap gigi, melalui sensor, mencipta impuls);
- dalam situasi lain.

Pengekod sudut boleh digunakan untuk menentukan sudut putaran aci, gear dan komponen berputar lain, serta pengekod mutlak. Selain itu, peranti sedemikian boleh digunakan dalam alatan mesin dan peranti robotik bersama dengan penderia kedudukan linear. Di mana anda perlu mengetahui dengan tepat kedudukan nod mekanisme.
Contoh praktikal pelaksanaan penderia induktif
Dalam amalan, reka bentuk penderia induktif boleh dilaksanakan dengan cara yang berbeza. Pelaksanaan dan kemasukan yang paling mudah adalah untuk penderia tunggal dua wayar, yang memantau kehadiran objek logam dalam zon kepekaannya. Peranti sedemikian sering dibuat berdasarkan teras berbentuk E, tetapi ini bukan titik asas. Pelaksanaan sedemikian lebih mudah dibuat.
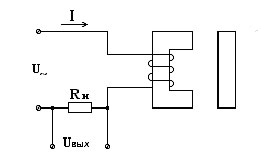
Apabila rintangan gegelung berubah, arus dalam litar dan voltan menurun merentasi beban berubah. Perubahan ini boleh dilakukan. Masalahnya ialah rintangan beban menjadi kritikal. Jika ia terlalu besar, maka perubahan arus apabila objek logam muncul akan menjadi agak kecil. Ini mengurangkan sensitiviti dan imuniti bunyi sistem. Sekiranya ia kecil, maka arus dalam litar akan menjadi besar, sensor yang lebih tahan akan diperlukan.
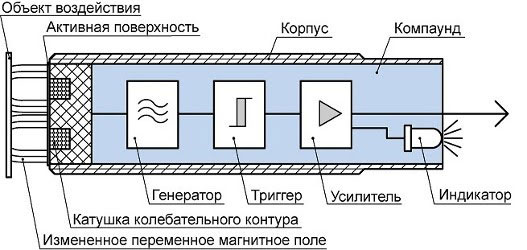
Oleh itu, terdapat reka bentuk di mana litar pengukuran dibina ke dalam perumahan sensor. Penjana menjana denyutan yang memberi makan kepada induktor. Apabila tahap tertentu dicapai, picu menyala, bertukar dari keadaan 0 kepada 1 atau sebaliknya. Penguat penimbal menguatkan isyarat dari segi kuasa dan (atau) voltan, menyala (memadamkan) LED dan mengeluarkan isyarat diskret ke litar luaran.
Isyarat keluaran boleh dibentuk:
- oleh elektromagnet atau geganti keadaan pepejal – sifar atau satu tahap voltan;
- "sentuhan kering" geganti elektromagnet;
- pengumpul terbuka transistor (struktur n-p-n atau p-n-p).
Dalam kes ini, tiga wayar diperlukan untuk menyambungkan sensor:
- makanan;
- wayar biasa (0 volt);
- wayar isyarat.
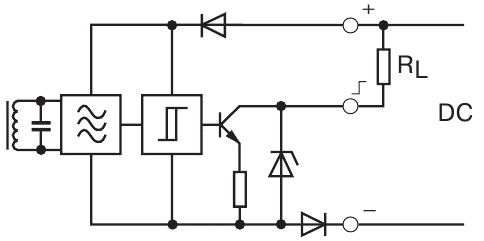
Penderia sedemikian juga boleh dikuasakan oleh voltan DC. Denyutan kepada induktansi ia terbentuk melalui penjana dalaman.
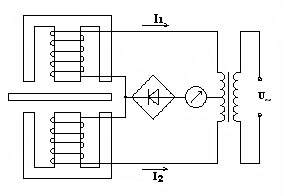
Pengekod pembezaan digunakan untuk pemantauan kedudukan. Jika objek terkawal adalah simetri berkenaan dengan kedua-dua gegelung, arus yang melaluinya adalah sama. Apabila sebarang belitan dialihkan ke arah medan, ketidakseimbangan berlaku, jumlah arus tidak lagi sama dengan sifar, yang boleh direkodkan oleh penunjuk dengan anak panah di tengah skala. Penunjuk boleh digunakan untuk menentukan kedua-dua magnitud anjakan dan arahnya. Daripada peranti penunjuk, anda boleh menggunakan skema kawalan yang, apabila menerima maklumat tentang perubahan kedudukan, akan mengeluarkan isyarat, mengambil langkah untuk menjajarkan objek, membuat pelarasan pada proses teknologi, dsb.

Penderia yang dibuat mengikut prinsip transformer pembezaan boleh laras secara linear dihasilkan dalam bentuk struktur lengkap, yang merupakan bingkai dengan belitan primer dan sekunder dan rod bergerak di dalam (ia boleh dimuatkan dengan spring). Wayar dibawa keluar untuk menghantar isyarat daripada penjana dan mengeluarkan EMF daripada belitan sekunder. Objek terkawal boleh dipasang secara mekanikal pada rod. Ia juga boleh dibuat daripada dielektrik - hanya kedudukan batang yang penting untuk pengukuran.
Walaupun terdapat kekurangan tertentu, sensor induktif menutup banyak kawasan yang berkaitan dengan pengesanan bukan sentuhan objek di angkasa.Walaupun perkembangan teknologi yang berterusan, peranti jenis ini tidak akan meninggalkan pasaran untuk mengukur peranti pada masa hadapan, kerana operasinya berdasarkan undang-undang asas fizik.
Artikel yang serupa: